|
Pengyuan Wang I am a PhD student at TUM CAMP computer vision group supervised by Prof. Dr. Nassir Navab. My research focuses on object pose estimations and robotic manipulations. |

|
ResearchMy research interest is in the pose estimation of category-level objects and novel objects, which is important for robotic applications. Also I am interested in vision-language-action models for generic robotic manipulations. |

|
GS-Pose: Category-Level Object Pose Estimation via Geometric and Semantic Correspondence
Pengyuan Wang, Takuya Ikeda, Robert Lee, Koichi Nishiwaki ECCV, 2024 project page / code / arXiv GS-Pose enables training category-level object pose estimations from only a few synthetic CAD models , and achieves comparable results with baselines trained on real pose dataset. |
|
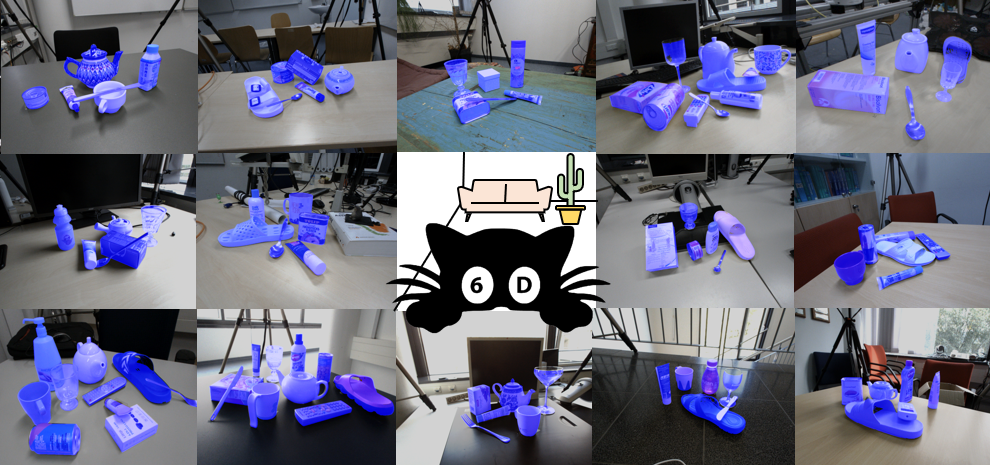
HouseCat6D - A Large-Scale Multi-Modal Category Level 6D Object Perception
Dataset with Household Objects in Realistic Scenarios
HyunJun Jung, Shun-Cheng Wu, Patrick Ruhkamp, Guangyao Zhai, Hannah Schieber, Giulia Rizzoli, Pengyuan Wang, Hongcheng Zhao, Lorenzo Garattoni, Sven Meier, Daniel Roth, Nassir Navab, Benjamin Busam, CVPR , 2024 (Highlight) project page / dataset / arXiv A large-scale category-level pose dataset with accurate ground truth pose annotations. The dataset features photometrically-challenging categories including transparent and metallic objects, and more diverse object poses in the real scenes. Feel free to test your pose estimation methods on our benchmark. |
|
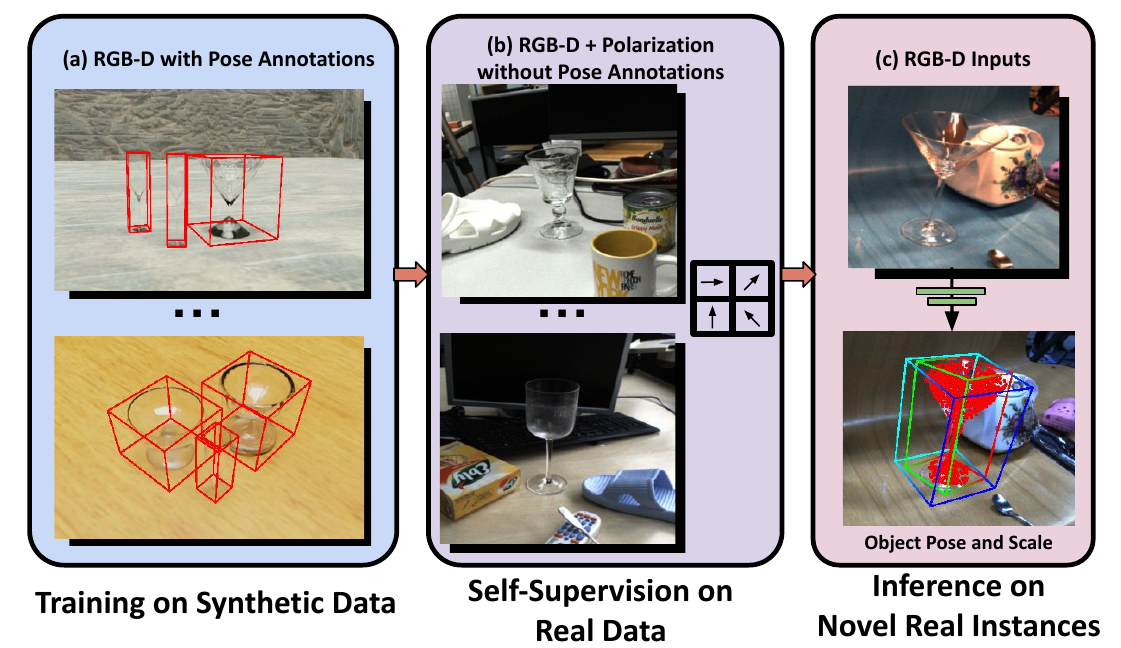
Improving Self-Supervised Learning of Transparent Category Poses
with Language Guidance and Implicit Physical Constraints
Pengyuan Wang, Lorenzo Garattoni, Sven Meier, Nassir Navab Benjamin Busam RA-L, 2024 arXiv We propose novel self-supervision losses to self-supervise the category-level pose estimations for transparent objects. Only RGB-D with polarization images and no real pose annotations are needed in the self-supervision stage. |
|
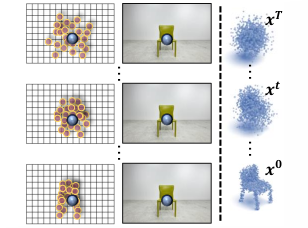
CCD-3DR: Consistent Conditioning in Diffusion for Single-Image 3D
Reconstruction
Yan Di , Chenyangguang Zhang, Pengyuan Wang, Guangyao Zhai, Ruida Zhang , Fabian Manhardt , Benjamin Busam, Xiangyang Ji, Federico Tombari arXiv, 2023 arXiv CCD-3DR works on generative networks imagining object point clouds from a single RGB image. Accurate point clouds are generated by diffusion networks with consistent object center conditioning. |
|
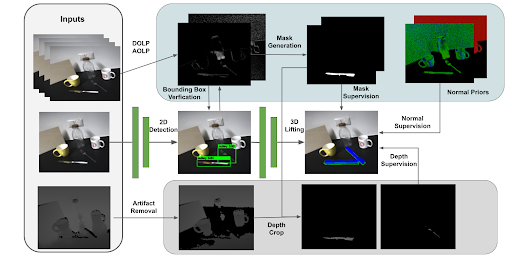
CroCPS: Addressing Photometric Challenges in Self-Supervised
Category-Level 6D Object Poses with Cross-Modal Learning
Pengyuan Wang, Lorenzo Garattoni, Sven Meier, Nassir Navab, Benjamin Busam BMVC, 2022 paper How to estimate the object pose of metallic objects from RGB-D inputs in presence of depth artifacts? CroCPS proposes a multi-modal approach to improve pose estimation accuracy in real scenes for metallic category. |
|
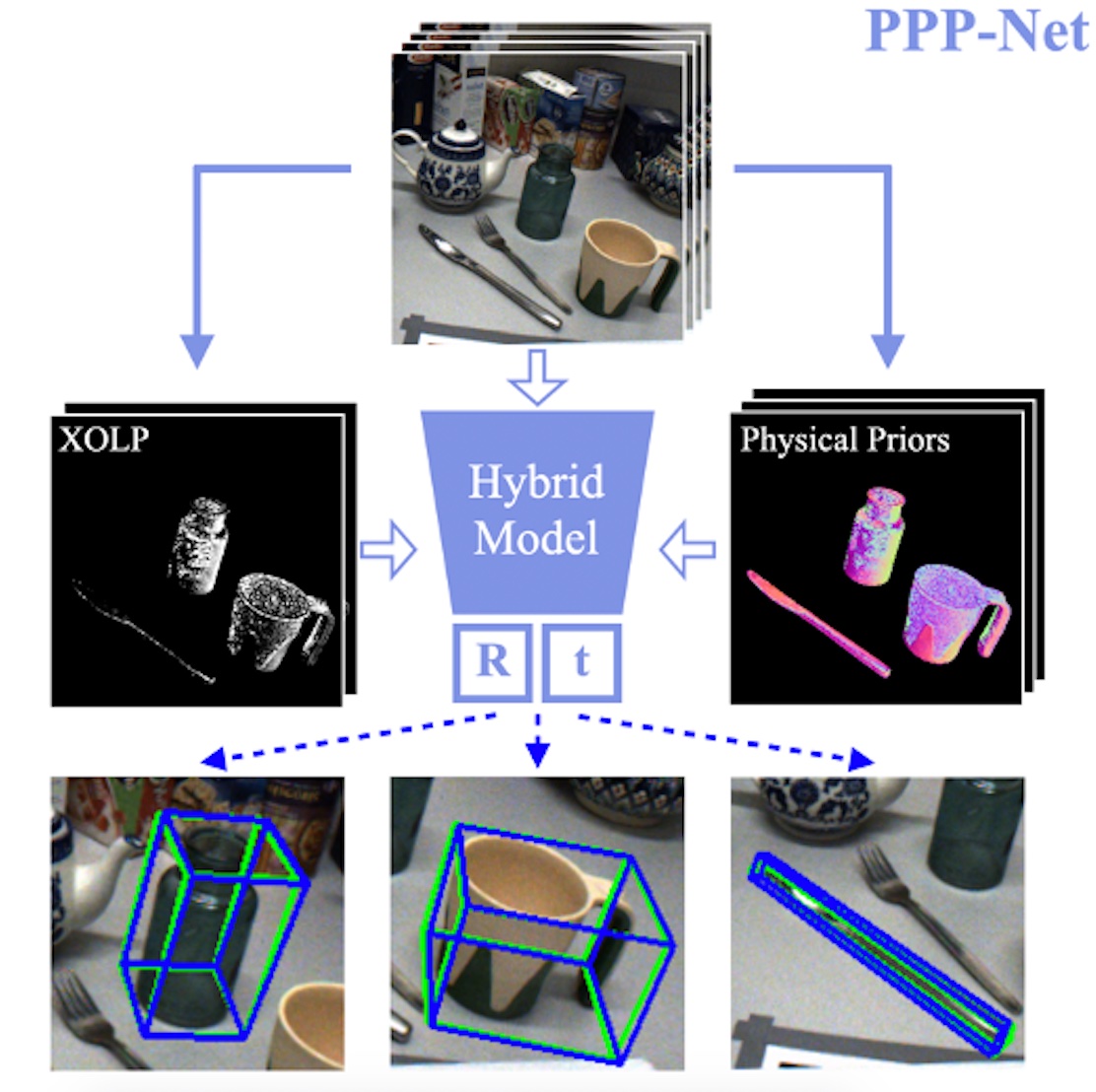
Polarimetric Pose Prediction
Daoyi Gao, Yitong Li , Patrick Ruhkamp, Iuliia Skobleva, Magdalena Wysock, HyunJun Jung, Pengyuan Wang, Arturo Guridi, Benjamin Busam ECCV, 2022 project page / paper / code PPP-Net proposes a hybrid model that utilizes polarizaiotn information with physical priors in a data-driven learning strategy to improve the accuracy of pose predictions for photometric challenging objects. |
|
PhoCaL: A Multi-Modal Dataset for Category-Level Object Pose
Estimation with Photometrically Challenging Objects
Pengyuan Wang*, HyunJun Jung*, Yitong Li, Siyuan Shen, Rahul Parthasarathy Srikanth, Lorenzo Garattoni, Sven Meier, Nassir Navab, Benjamin Busam CVPR, 2022 project page / dataset / arXiv We propose a novel method to annotate object poses accurately with a robot arm, especially we design a calibration pipeline for hand-eye calibration of the cameras. Our method annotates the object poses accurately, even for photometrically-challenging objects such as glasses and cutlery. |

|
DemoGrasp: Few-Shot Learning for Robotic Grasping
with Human Demonstration
Pengyuan Wang*, Fabian Manhardt*, Luca Minciullo, Lorenzo Garattoni, Sven Meier, Nassir Navab, Benjamin Busam IROS, 2021 arXiv DemoGrasp proposes to learn robotic grasping from human demonstrations. In the method we learn the grasping pose and object shape jointly in a demonstration sequence. Afterwards we propose a novel object pose estimator to get object poses in the real scenes as well as the grasping point. |
Side Projects |

|
Unofficial Implementation of CLIP Visual Prompting
Github Code Visual prompting recognizes the keypoint positions in the images by specifying the keypoint names with CLIP. The method is achieved by drawing circles around the keypoints. We unofficially implement the method with CLIP models and optimal transport functions, and provide a testing example in github. |
|
Feel free to steal this website's source code. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. Also, consider using Leonid Keselman's Jekyll fork of this page. |